
Echo VSLAM
3D計測 × 測深データ統合の技術
Echo VSLAMとは
Echo VSLAM(エコー・ブイスラム)は、港湾施設やプラントの維持管理で求められる 桟橋下や暗渠・函渠、水槽・ピットなど、GNSS(衛星測位)が届かない環境での計測を想定した技術です。
従来、このような環境では、ダイバーによる潜水調査や簡易的な手法に頼らざるを得ず、 安全性・効率性・取得できる情報量の面で課題が残されていました。
Echo VSLAMは、音響測深データと画像情報を組み合わせ、後処理によって時刻同期・統合することで、 現場で実用可能な形での三次元的な形状把握を目指します。 これにより、構造物下や閉鎖空間を含めた調査・点検業務への展開が期待されます。

Hy-CaTによる航行・計測イメージ
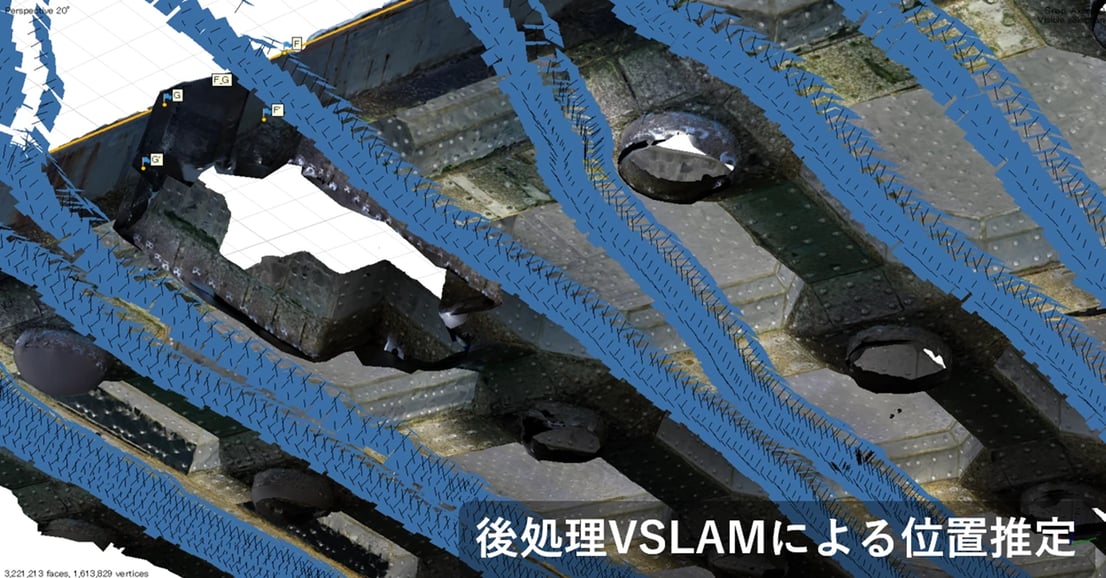
Echo VSLAMによる後処理・位置推定イメージ
モデル例(取得データと活用イメージ)
Echo VSLAMにより取得した三次元モデルの例を以下に示します。
桟橋下や暗渠など、GNSSの利用が難しい環境においても、 底面や構造物形状を含めたデータ取得が可能です。

桟橋桁下における底面および桁下面の形状を、 三次元データとして可視化した例です。
これらのデータは、桟橋周辺の底面状況の把握や、 洗掘の有無・程度の評価に活用することが可能です。


上記の三次元データから、堆積量の算定や経時比較といった評価業務への展開が可能です。
Echo VSLAMを活かしたソリューション
Echo VSLAMは、GNSSの利用が難しい環境においても、 三次元的な形状把握を可能とする計測技術です。
本技術により取得した計測データは、 Hy-SCNをはじめとした当社の測深・点検ソリューションに活用され、 構造物周辺や内部空間を含めた、シームレスな状況把握を実現します。

フォームが表示されるまでしばらくお待ち下さい。
恐れ入りますが、しばらくお待ちいただいてもフォームが表示されない場合は、こちらまでお問い合わせください。